1. 核心摘要
这篇笔记整理自 FAST-Calib (arXiv:2507.17210)。这是一个极其实用的工具库,旨在解决机器人开发中最头疼的标定问题。作者设计了一种定制的 3D 标定板,结合对 LiDAR 扫描模式不敏感的边缘提取算法,实现了一秒内完成 LiDAR 和相机的外参标定,且误差控制在 6.5mm 以内。
2. 关键概念/术语
- Extrinsic Calibration (外参标定):确定 LiDAR 坐标系与相机坐标系之间旋转和平移矩阵 ($R, T$) 的过程。
- Solid-state LiDAR (固态雷达):扫描模式与传统机械雷达不同(通常是非重复扫描),传统标定方法难以适用。FAST-Calib 解决了这个问题。
- PnP (Perspective-n-Point):通过 3D 点与 2D 图像点的对应关系求解相机位姿的算法。
- Edge Dilation Compensation (边缘膨胀补偿):LiDAR 光斑有一定大小,扫描边缘时会产生“膨胀”效应,导致测量距离偏差,算法对此进行了数学补偿。
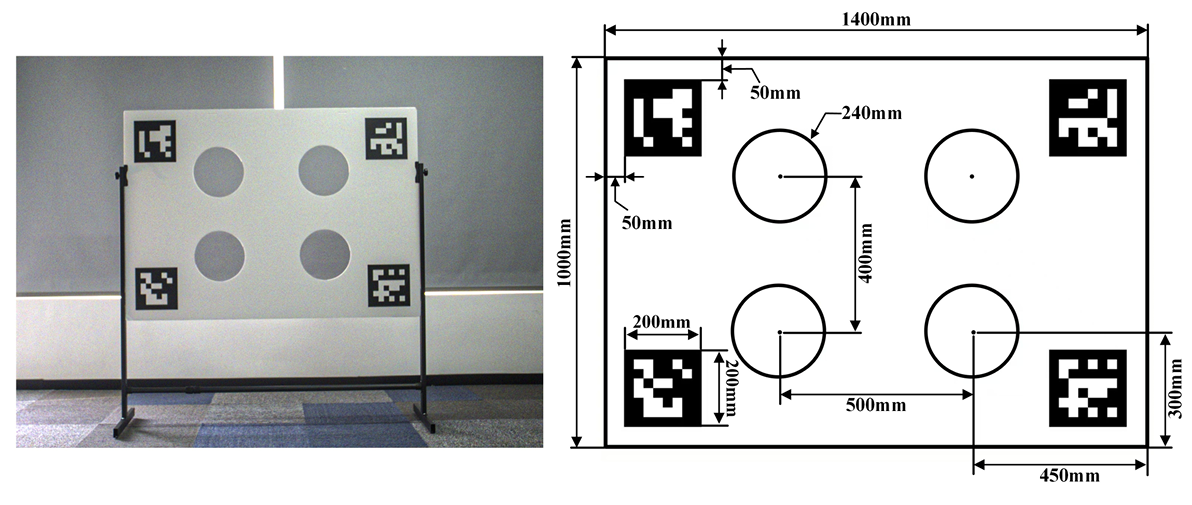
FAST-Calib 定制标定板示意
3. 详细内容整理
3.1 标定流程
- 硬件准备:制作一个带有特定图案(通常是圆孔和 ArUco 标记)的定制 3D 标定板。
- 数据采集:手持标定板在传感器前晃动,或者固定标定板移动机器人。
- 算法处理:
- 视觉端:识别 ArUco 标记,通过 PnP 算法解算标定板在相机系下的位姿。
- LiDAR 端:提取标定板上的孔洞边缘。由于不同雷达扫描线束不同,算法采用了与扫描模式无关的边缘提取策略。
- 联合优化:构建 3D-3D 对应关系或点面约束,求解外参。
3.2 性能表现
- 速度:处理时间小于 0.7秒。
- 精度:点对点配准误差 < 6.5mm。
- 通用性:支持机械式(如 Ouster)和固态式(如 Mid360, Avia)LiDAR。
4. 关键知识点详解
4.1 标定原理推导
标定的本质是求解 $T_{CL}$ (LiDAR 到 Camera 的变换)。 \(P_C = T_{CL} P_L\) 其中 $P_C$ 是相机坐标系下的点,$P_L$ 是 LiDAR 坐标系下的点。
FAST-Calib 的核心在于如何精确获取同一物理点在两个坐标系下的坐标:
- 相机侧:利用 ArUco 标记的已知物理尺寸,可以非常精确地计算出标定板中心的 $P_C$。
- LiDAR 侧:LiDAR 扫描到标定板上的圆孔。通过拟合圆孔边缘,可以计算出圆心在 LiDAR 坐标系下的 $P_L$。这里引入了椭圆拟合来补偿激光光斑造成的边缘模糊。
构建了 $N$ 组 $(P_{Ci}, P_{Li})$ 对应点后,通常使用 SVD 分解或非线性优化来求解最优的 $T_{CL}$。
💬 评论互动