1. 核心摘要
本篇笔记详细整理了 C++ 标准模板库 (STL) 中核心数据结构(容器)的特性、适用场景及常用操作。重点解析了 Vector 的动态扩容机制、Map 与 Unordered_map 的底层区别,以及迭代器失效等关键问题,旨在帮助开发者在实际编程中做出最优的数据结构选择。
2. 关键概念/术语
- 容器 (Containers):用于存储和管理数据的对象,分为序列式容器(如 vector, list)和关联式容器(如 map, set)。
- 迭代器 (Iterators):连接容器与算法的桥梁,提供了一种统一访问容器元素的方法,类似于指针。
- 底层实现 (Underlying Implementation):指数据结构在内存中的具体组织方式(如数组、链表、红黑树、哈希表),直接决定了操作的时间复杂度。
- 均摊复杂度 (Amortized Complexity):指一系列操作的平均耗时。例如
vector扩容虽然偶尔耗时,但平均下来插入操作是 $O(1)$。
3. 详细内容整理
3.1 序列式容器 (Sequence Containers)
Vector (动态数组)
最常用的容器,支持随机访问。
- 特性:连续内存空间,尾部插入/删除效率高,头部或中间插入/删除效率低。
- 常用操作:
push_back(val): 尾部插入。pop_back(): 尾部删除。operator[]/at(): 访问元素(at带边界检查)。resize(n)/reserve(n): 调整大小 / 预分配容量。front()/back(): 返回首/尾元素引用。
Deque (双端队列)
- 特性:分段连续内存,支持头尾高效插入/删除。
- 常用操作:
push_front(val)/push_back(val): 头/尾插入。pop_front()/pop_back(): 头/尾删除。
List (双向链表)
- 特性:非连续内存,支持任意位置高效插入/删除,不支持随机访问。
- 常用操作:
push_back/push_front: 插入。insert(iterator, val): 在指定位置前插入。erase(iterator): 删除指定位置元素。splice(): 链表拼接(高效移动元素)。
3.2 容器适配器 (Container Adapters)
Stack (栈)
- 特性:先进后出 (LIFO),默认基于
deque实现。 - 常用操作:
push(val): 入栈。pop(): 出栈(无返回值)。top(): 获取栈顶元素。empty(): 判空。
Queue (队列)
- 特性:先进先出 (FIFO),默认基于
deque实现。 - 常用操作:
push(val): 入队。pop(): 出队。front(): 获取队头。back(): 获取队尾。
Priority_queue (优先队列)
- 特性:基于堆 (Heap) 实现,默认大顶堆(最大元素在
top)。 - 常用操作:
push(val): 插入元素并调整堆。pop(): 删除堆顶元素。top(): 获取优先级最高的元素。
3.3 关联式容器 (Associative Containers)
此类容器底层通常基于红黑树实现,插入和查找的时间复杂度均为 $O(\log n)$,且存储是自动排序的。
Set (唯一键集合)
- 特性:元素即 Key,不允许重复,插入后自动排序。
- 常用操作:
insert(val): 插入元素(若已存在则插入失败)。erase(val): 删除指定值的元素。find(val): 查找元素,返回迭代器。count(val): 返回 1(存在)或 0(不存在)。lower_bound(val): 返回第一个 $\ge$ val 的迭代器。
Multiset (多重集合)
- 特性:允许存储重复的元素,自动排序。
- 常用操作:
insert(val): 插入元素(总是成功)。erase(val): 删除所有等于 val 的元素。erase(iterator): 仅删除迭代器指向的那一个元素。count(val): 返回元素出现的次数。equal_range(val): 返回 pair,包含等于 val 的元素范围[first, last)。
Map (唯一键映射)
- 特性:存储 Key-Value 对,Key 唯一且排序。
- 常用操作:
insert({key, val}): 插入键值对。operator[key]: 访问元素。若 Key 不存在,会创建一个默认值的元素插入。at(key): 访问元素。若 Key 不存在,抛出异常。erase(key): 删除指定 Key 的键值对。find(key): 查找 Key,返回指向 pair 的迭代器。
Multimap (多重映射)
- 特性:允许 Key 重复,按 Key 排序。不支持
operator[]和at()。 - 常用操作:
insert({key, val}): 插入键值对。erase(key): 删除所有该 Key 的键值对。find(key): 返回第一个该 Key 的迭代器。count(key): 统计该 Key 的数量。equal_range(key): 获取该 Key 对应的所有 Value 的范围。
3.4 无序容器 (Unordered Containers)
此类容器基于哈希表 (Hash Table) 实现,内部元素无序。优势是平均增删查改复杂度为 $O(1)$,但在哈希冲突严重时退化为 $O(n)$。
Unordered_set (无序唯一集合)
- 特性:存储唯一元素,无特定顺序,利用 Hash 函数组织数据。
- 常用操作:
insert(val): 插入元素。erase(val): 删除元素。find(val): 查找元素,返回迭代器。count(val): 检查元素是否存在(0 或 1)。bucket_count(): 返回当前桶的数量(常用于性能调试)。
Unordered_multiset (无序多重集合)
- 特性:允许存储重复元素,无特定顺序。
- 常用操作:
insert(val): 插入元素。erase(val): 删除所有等于 val 的元素。find(val): 查找任意一个等于 val 的元素迭代器。count(val): 统计元素出现次数。
Unordered_map (无序唯一映射)
- 特性:存储 Key-Value 对,Key 唯一,无序。
- 常用操作:
insert({key, val}): 插入键值对。operator[key]: 访问或创建元素(若 Key 不存在则默认构造)。at(key): 安全访问,Key 不存在抛异常。erase(key): 删除指定 Key。find(key): 查找 Key。load_factor(): 返回负载因子(元素数量/桶数量),衡量哈希表拥挤程度。
Unordered_multimap (无序多重映射)
- 特性:允许 Key 重复,Key-Value 对无序。不支持
operator[]。 - 常用操作:
insert({key, val}): 插入键值对。erase(key): 删除所有该 Key 的键值对。find(key): 查找。equal_range(key): 返回 pair,包含所有匹配 Key 的迭代器范围。
4. 关键知识点详解
4.1 Vector 的扩容机制与内存管理
std::vector 之所以高效,在于其巧妙的内存管理策略。
- Capacity vs Size:
size():当前容器中实际存储的元素个数。capacity():当前容器已分配内存能容纳的元素个数。
- 扩容逻辑:
当
push_back导致size() > capacity()时,vector 会触发扩容:- 开辟新空间:通常是当前 capacity 的 1.5倍 或 2倍(取决于编译器实现,如 GCC 是 2 倍,MSVC 是 1.5 倍)。
- 数据拷贝:将旧内存区域的数据拷贝(或移动)到新内存区域。
- 释放旧空间:销毁旧对象并释放旧内存。
- 性能影响: 虽然扩容操作涉及内存分配和数据拷贝,是一个 $O(n)$ 的操作,但由于扩容是成倍增长的,插入 $n$ 个元素的总扩容次数是 $\log n$ 级别的。因此,单次插入的均摊复杂度 (Amortized Complexity) 仍为 $O(1)$。
- 优化建议:
如果在插入前已知大概的数据量,务必使用
reserve(n)预先分配内存,避免频繁的重新分配和数据拷贝。
4.2 Map 与 Unordered_map 的底层对比
选择正确的 Map 容器对性能至关重要。
| 特性 | std::map | std::unordered_map |
|---|---|---|
| 底层实现 | 红黑树 (Red-Black Tree) | 哈希表 (Hash Table) |
| 有序性 | Key 自动递增排序 | 无序 |
| 查找复杂度 | $O(\log n)$ (稳定) | 平均 $O(1)$,最坏 $O(n)$ |
| 插入/删除 | $O(\log n)$ | 平均 $O(1)$ |
| 空间占用 | 较低 (节点存指针) | 较高 (哈希桶+节点) |
| 适用场景 | 需要按序遍历、范围查找、对稳定性要求高 | 只需快速查找、无需排序、数据量大 |
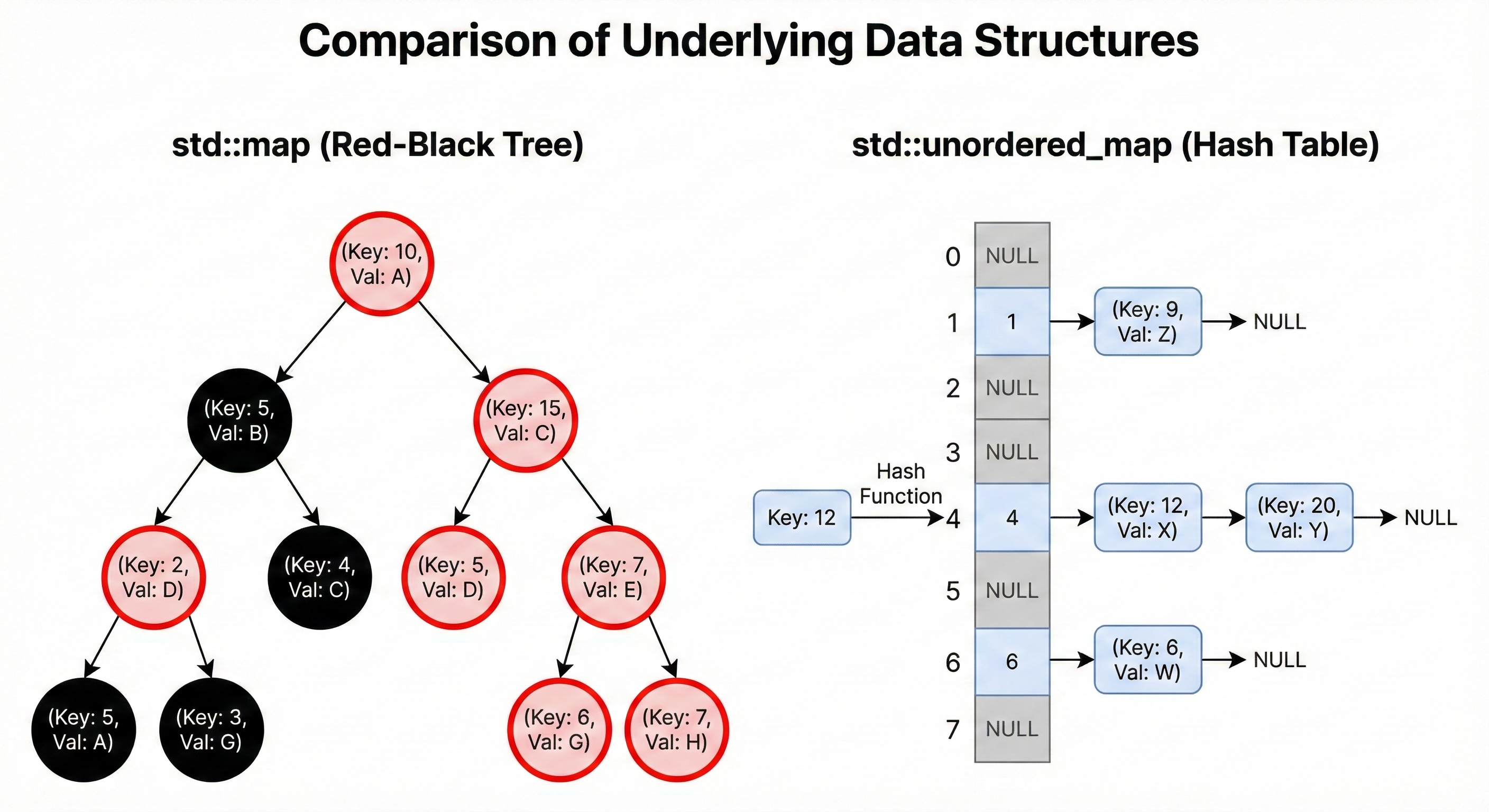
红黑树与哈希表结构示意图
4.3 迭代器失效 (Iterator Invalidation)
这是操作 STL 时最容易导致程序崩溃(Segmentation Fault)的原因。
- Vector/Deque 失效:
- 插入操作:如果插入触发了扩容,所有指向旧内存的迭代器、指针、引用全部失效。如果没有扩容,插入点之后的迭代器失效。
- 删除操作:被删除元素之后的所有迭代器失效。
std::vector<int> v = {1, 2, 3, 4}; auto it = v.begin(); v.push_back(5); // 如果触发扩容,it 变成野指针 // std::cout << *it; // 危险操作! - Map/Set/List 失效:
- 插入操作:不会导致现有迭代器失效(因为节点在内存中是独立的)。
- 删除操作:仅指向被删除元素的迭代器失效,其他迭代器不受影响。
正确删除 Map 元素的写法:
std::map<int, string> m; auto it = m.begin(); while (it != m.end()) { if (it->second == "delete_me") { // m.erase(it++); // C++11 之前的经典写法 it = m.erase(it); // C++11 erase 返回下一个有效迭代器 } else { ++it; } }
4.4 常用算法复杂度速查
在使用 <algorithm> 库时,需清楚其代价:
std::sort: 基于快排、堆排和插入排序的混合排序 (Introsort)。平均和最坏复杂度均为 $O(n \log n)$。std::find: 线性查找,$O(n)$。std::binary_search: 二分查找(要求序列已序),$O(\log n)$。std::lower_bound: 二分查找第一个大于等于 value 的位置,$O(\log n)$。
💬 评论互动